Miljø- og Planlægningsudvalget 2010-11 (1. samling)
MPU Alm.del
Offentligt
Faglig rapportering til FVMStatusnotat vedrørende udvikling af teknologier og systemer til vildtvenligehøstmetoderOle Green, Institut for Biosystem teknologi, Det Jordbrugsvidenskabelige Fakultet,Aarhus Universitet.
Igangværende aktiviteter ved DJFDJF har gennemført test af termiske systemer til detektion af hund og kat i tritikale og græs i feltforsøg.Hund og kat har svaret til størrelsen af rålam og harer. Forsøgene er udført i solskin, let skyet og overskyetvejr og i afstande på 1-50 m fra objektet. Dataanalyse pågår i øjeblikket, og resultaterne offentliggøres somen videnskabelig publikation først i 2011.
Moderne høstmetoderDen stigende mekanisering i landbruget har resulteret i udvikling afmaskiner med større og større arbejdsbredde, som kan operere medhøjre og højre hastigheder. Dette har medført en øget risiko for, atvildtet bliver invalideret eller offer for disse maskiner.Det er i dag muligt at høste mere end 90.000 m2kornafgrøder per time (9ha/time) under optimale vilkår for maskine og afgrøde med en langrække forskellige fabrikater af mejetærskere. Mejetærskere opererermed en arbejdsbredde på op til 12 meter og hastigheder på 5-8km/timen.I forbindelse med klipning af græs ses endnu større kapaciteter, hvor180.000-200.000 m2per time (18-20 ha/time) ikke længere erusædvanligt. Her arbejdes med arbejdsbredder på op til 14 meter og hastigheder på helt op til 15-18km/time.
1
Med disse hastigheder og arbejdsbredder er det meget vanskeligt for vildtet at nå i sikkerhed igennem dentætte afgrøde, og derfor er den naturlige reaktion at trykke sig mod jorden, hvilket oftest har fatalekonsekvenser for dyrene og for kvaliteten af den høstede afgrøde. Rester af vildt i ensilage kan medføreudvikling af botulismebakterier, og ved opfodring af denne afgrøde kan der ske dødsfald i besætningen. Derer talrige eksempler på dette i både kvæg- og hestebesætninger. Det er derfor hverken af interesse forlandmænd eller for vildtet, at dette ikke kan holdes fra afgrøderne i afhøstningssituationen.
Mulige løsningerDer findes ingen kommercielle løsninger, som fungerer med de store høstmaskiner. Enkelte tiltag benyttesdog i ringe udstrækning. Disse tiltag går på, hvorledes der køres på marken, således at dyrene skræmmesud af marken, ved at høsten startes fra midten af marken, og derefterarbejdes der ud mod kanterne. Dette sker dog på bekostning afkapaciteten (pga. begrænsede muligheder for optimal planlægning ogoptimal udnyttelse af arbejdsbredde) og benyttes derfor sjældent.I det seneste år har der været arbejdet på udvikling af teknologier til atunderstøttevildtvenligehøstmetodervedInstitutforBiosystemTeknologi. Instituttet har dybtgående kendskab til diverseafhøstningsmetoder og -redskaber og har ekspertisen til at arbejdeindenfor relevante områder: Detektion af vildt, bortskræmning og udarbejdelse af specifikke ruteplaner tilautostyring.
Detektion af vildt med termografiTrykkende vildt i arbejdszonen i en afgrøde kan detekteres med termiske kameraer og kan anvendes isammenhæng med en alarmanordning, som enten giver en advarsel til chaufføren eller direkte går ind ogstopper maskinen.Vegetationen og dens tæthed har naturligvis betydelig indflydelse på detektionsraten. Undersøgelser viser,at 82-87 % af hjortene blev fundet i løvskovsbevoksning, hvorimod 100 % af dyrene blev fundet på åbneenge og marker, mens kun 30-60 % af dyrene blev fundet i nåletræsbevoksning[1]. Der var ingen mærkbarforskel på opdagelsen af stående versus liggende dyr, sådan som det findes i andre studier [2]. I et specifiktcasestudie med hvid-halede rådyr blev der desuden udført en undersøgelse for at sammenligne antallet afrådyr opdaget af jordpersonalet med antallet af rådyr fundet fra luften med termisk opmåling. Resultaterneaf denne undersøgelse viste, at 88,2 % af dyrene blev fundet af jordpersonalet, hvorimod 100 % af dyreneblev fundet fra luften med termisk opmåling [3].Der arbejdes pt. på definitionen af krav til kamerasystemets følsomhed, som afhænger af behovet. Hvistemperaturforskellen mellem mål og den termiske baggrund er lille, er det vanskeligt at sikre et robustdetektionssystem, fordi den gennemsnitlige varmefølsomhed af de fleste ikke-kølede kameraer er omkring0,1 �C.
2
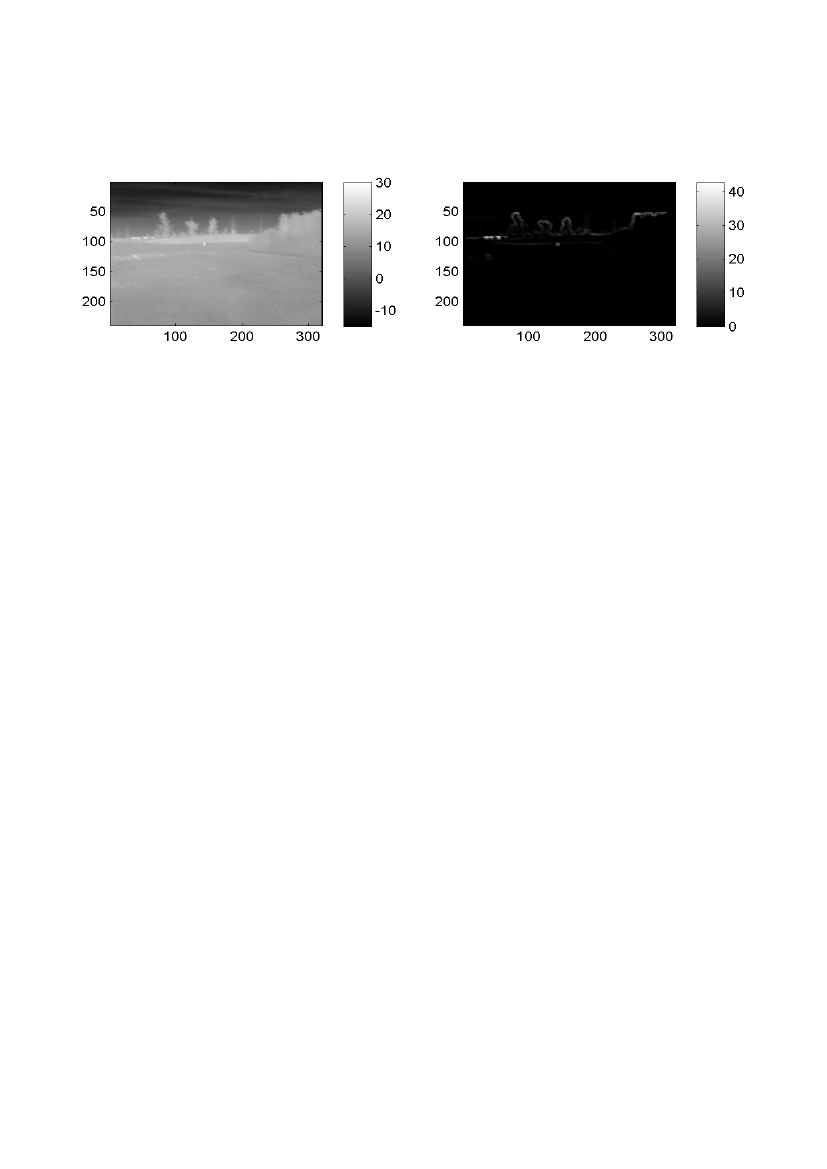
Foreløbige resultater har indikeret, at vi kan detektere større dyr (ræve og rådyr) på 30-40 meters afstandmed kendt teknologi, som dog ikke på nuværende tidspunkt er kommercielt tilgængeligt for landmænd.
Illustrationen til venstre viser rådyr på ca. 100 meters afstand i rå billedformat, mens billedet til højre er detbehandlede billede, hvor støj er sorteret fra og viser rådyrets position midt i billedet.
Udvikling af andre løsningsmodellerVildtvenlige ruteplaner til autostyring ved høst
Institut for Biosystemteknologi har gennem de seneste par år opbygget ekspertise inden for intelligentruteplanlægning, og der vil kunne udvikles et modul, som tager særlige hensyn i vildtfølsomme områder.Dette skal baseres på et grundigt kendskab til vildtets levevis og adfærdsmønstre, og det vil være relevantat inddrage forskningsarbejde indenfor vildtbiologi.
OpsummeringDet er afgørende for udviklingen af succesrige systemer, at der er tæt kontakt til maskinproducenter, somønsker at indgå i større satsninger med henblik på at udvikle systemer, der kan bidrage til mere vildtvenligehøstmetoder. Der bør således etableres et samarbejde, der baserer sig på den teknologiske platform, somInstitut for Biosystemteknologi har opbygget med henblik på at udvikle og dokumentere tekniske løsninger.Samarbejdet bør inkludere Institut for Biosystemteknologi, DMU, AU’s ekspertise indenfor vildtøkologi ogrelevante firmaer.DMU, AU og DJF planlægger at søge midler til et fælles udviklingsprojekt, idet det vurderes at ligge indenforrammerne af Grønt Udviklings- og DemonstrationsProgram, der bla. uddeler midler til forsknings- ogudviklingsprojekter, som bidrager til bæredygtig fødevareproduktion.Et projekt vil således udnytte de synergier, der ligger i at kombinere DJF’s teknologiske platform med DMUog AU’s ekspertise indenfor vildtøkologi.
Litteratur1. Susan Bernatas, Certified Wildlife Biologist, Vision Air Research, Inc, Idaho, USA. A report on "Aerialinfrared deer survey", Shelter Island, NY, March 2008.2. Wiggers, E. P., and S. F. Beckerman, 1993. Use of thermal infrared sensing to survey white-tailed deerpopulations. Wildlife Society Bulletin, 21:263-268
3
3. David E. Naugle, Jonathan A. Jenks, and Brian J. Kernohan. Use of thermal infrared sensing to estimatedensity of white-tailed deer. Wildlife Society Bulletin 1996, 24(1): 37-43.
4